
|
|
|
|
2013年07月23日 |
|
|
1. Introduction Most Geologists and Geotechnical Engineers are familiar with the use of Spherical projections for the presentation and analysis of structural geology data, but they may not understand completely the theory foundation of analytical methods. In order to assist such readers, the principles and uses of Equal angle and equal area projections are discuss comprehensively in this papers. In addition, methods for projection plotting by computer are introduced hereafter. Before talking about Equal angle and equal area projections, let’s go back to basic principles. To keep things concrete, we’ll talk the well known three dimensional plane equation ax+by+cz=d. 2. Review of space plane We will use the right-handed rectangular coordinate system (Cartesian coordinate system) in this paper. The positive x-axis directs toward the north direction, y-axis toward the east direction, while z-axis downward. The angle on x-y plane (orientation a line) is measured beginning from the x-axis in a clockwise sense, while the inclined angle is measured from x-y plane downward.
Figure 2.1
In three dimensional spaces(3D) we can determine a unique plane by specifying a point in the plane and a vector perpendicular to the plane (Figure 2.1). A vector perpendicular to a plane is called a normal vector to the plane. Suppose
that we want to find an equation of the plane passing through a given
point through P r It should
evident obviously from above figure to show that the plane consist
precisely of these points P(x,y,z) for which the vector (r- r n?(r-
r ,or expressed the vector equation in terms of components as <a,b,c>?<x-x From which we get a( x-x This is called the point-normal form of the equation of a plane. If preferred, this equation can be rewritten in the general form as ax+by+cz
=a x denotes
d= ax ax+by+cz=d ,or <a,b,c>?<x,y,z>=d (4) In
spherical coordinate system (Figure 2.2), if we set the radius length of
the sphere equal to 1.0, since ( n?r=
Cos( ,where n?r=
Cos( r’=<ad+xSin( The trace of intersection of unit sphere and a plane can solve by rotating unit position vector r’ about unit normal vector in required scene 360°.
Figure 2.2 An inclined geological plane is defined by its orientation with respect the north which may be defined by strike or dip direction of the plane and defined by its inclination or dip to the horizontal. The strike of a plane is the trace of the intersection of that plane with a horizontal surface. A dip direction is the orientation which perpendicular to plane strike. In structural geology, when people concern only the attitude (strike/dip or dip direction/dip) of a structural plane, so we can assume d=0, While in geological weakness plane displacement, rock stability analysis (rock wedge volume computing) and drill-core analytical calculation problem etc., d can not be assumed all zero for concerned planes (for example, if a rock wedge is cut by 5 planes (five equations), to calculate the volume of rock wedge, for conveniently, we can set three of them with d=0 only) If we use the spherical coordinate system, the plane with a dip direction (α) and a dip angle (β), then the downward unit normal vector can be defined as n= <a,b,c>=< - Cos(α)sin(β),Cos(β)Cos(α)Sin(β),Cos(β)> 7 Any unit position vector on the plane with a trending (p) and plunging (q) is r= <x,y,z>=< Cos(p)Cos(q), Sin(p)Cos(q),Sin(q)> 8 and the plane equation can be expressed as following: <a,b,c>?<x,y,z>=-Cos(α)Cos(β)Cos(p)sin(q),-Sin(α)Cos(β)Cos(p)Sin(q) +Sin(β)Cos(q)=d=cos( Any two
vectors <u>=<u Then, the unit normal vector of the plane are defined as the vector cross products <u>×<v>= Where, The unit normal vector of a plane passing unit sphere is unique, but the unit position vector of the plane can be many, so a plane rotate about a axis, you can use the unit normal vector to represent this plan, you can not use the unit dip direction vector to represent this plane, but you can use two vectors lying in the plane to get the desired plan for rotation also. The intersection of unit sphere and plane are a three dimensional circle. If the plane (d=0) is passing unit spherical center, then their intersection is call great circle, while a plane with d<>0, its intersection is call small circle. The intersection of a horizontal plane with reference unit sphere is called primitive circle.
Figure 2.3 As shown
in figure 2.3, any unit position vector r on the plane with a trending
(p, dip direction of a line) and plunging (q, dip angle) should
perpendicular to the plane normal. If the plane with unit normal vector
n=<a,b,c>, and unit position vector r=<x,y,z>. From n?r=cos( aCos(p So, the
trace of the unit sphere and plane intersection can be calculated by
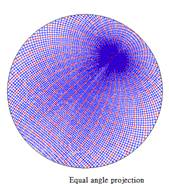
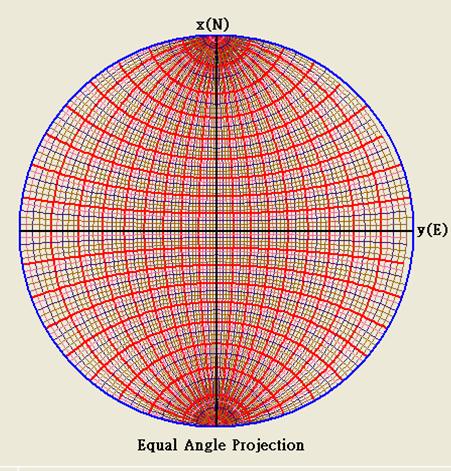
setting p 3. Equal angle projection The equal angle projection, also know as Stereographical projection or Wulff Projection, is obtained by the method illustrated in th figure 3.1 and 3.2. The line AZ from point A(x,y,z) on the unit sphere to the zenith point Z(0,0,-1) pierces
the unit horizontal (equator) plane at point
point
surface.
Since vecctor <ZA> =<x,y,z-1>, vector<
figure 3.1
figure 3.2 It Implies that
The above three governing equation are reversible, substitute <x,y,z>= < Cos(p)Cos(q), Sin(p)Cos(q),Sin(q)> into equation 13c, we get Tan(p)=
Sin(p)=± Cos(p)=
± From x Sin(q)= Cos(q)=± Substituting equations (13) and (14) into the general plan equation
ax+by+cz=d=Cos( ( x- If we
denote (h,k) as center of a small projection circle, r as radius , then
h= k= r= When
(x- It means
that the great circle equal angle projection is with a arc with center
at (h,k)=( h=-Cos( k= Sin( r= if we
denote four unit position vectors in the attitudes at (
(a)at
dip direction/dip=(
x
y
(b)at
did direction/dip=(
x
(c)
at did direction/dip=(
x
y
(d))at
did direction/dip=(
x
y
Figure 3.4
If
we set did direction did=90°,
dip angle dip=0°~ 180° for
every 2° interval, and set did=0°,dip=0°
and 3.1 Measurement of the angle of two vectors from equal angle projection As
mention before, the equal angle projection formula of a unit vector are
x cos( This
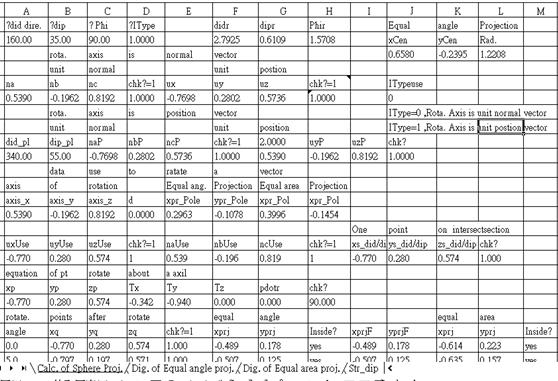
angle can measure from the projection map. If we assume t cos( If denote sin( 3.2 Application of equal angle projection Let the plan P(pole p) strike N250E and dip35( Dip direction/dip=160/35),It is required to project this plane by equal angle method. Since the dip direction unit position vector is r=<-0.7698,0.2802,0.5736> , unit normal is n=
<0.5390,-0.1962,0.8192>, then the great circle projection (x x
y the great circle center (h,k) and r are h= k= r= the
normal projection (x x y Since we can easy to calculate an equal angle projection of center, radius of the great circle and small circle, so to plot the projection diagram is a easy task of plotting an arc for great circle, and circle or arc of small circle projection. The procedures of plotting a small circle projection can be summarized as follows. Calculating a unit normal vector of a plane.
(2a) Calculating then
projection coordinate of the three key points at
( (2b) Or, Calculating the small circle projection its center (h,k), and r . Drawing three points circle, or a circle with center and radius given. The following Excel spreadsheet is designed for calculating and drawing the small (or great) circle equal angle and equal area projection.
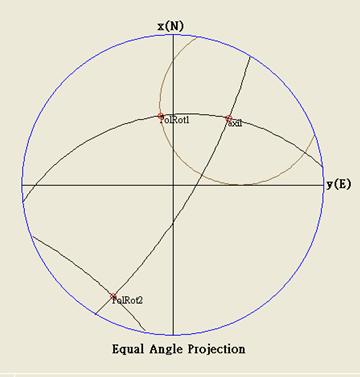
Figure 3.5 3.3 Rotation about an axis inclined axis Let
the plane P
x
+
y
+
z
+
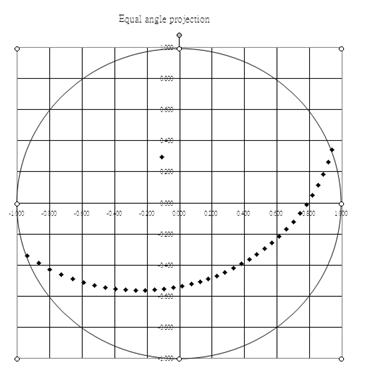
Since the unit normal vector of plane (170/50) is <0.7544, - 0.1330, 0.6428>, the unit position vector (40/30) is <0.6634, 0.5567, 0.5>, the unit normal vector after rotation is <-0.8691, 0.4632,-0.1733>. The corresponding projection coordinates (figure 3.3) are (0.4422, 0.3711), (0.4592, -0.081), (0.7408, -0.3949), respectively. Please note here that the sign of z coordinate of the normal vector (170/50) before and after rotation are different, then the coordinate of normal vector (170/50) after rotation should change the sign when applies the projection equation 13 and 20g ,,20h etc. Figure 3.6 shows the results.
Figure 3.6 Figure 3.7 is an inclined equal-angle net for rotation a line inclined at 30° to the plane of projection.
Figure 3.7
4. Equal area projection The equal area projection, also know as Schimidt projection, is Obtained by the method illustrated in th figure 4.1. The line TA is from the
Figure 4.1 zenith
point T(0,0,1) to point A(x,y,z) on the unit sphere surface. By swing
Line =
x y
The above three governing
equations are reversible.if we denote four unit position vectors in the
attitudes at (
(a) at did direction/dip=[(
x
y
(b) at did direction/dip= (
x
y
(c) at did direction/dip=[(
x
y
(d) at did direction/dip=(
x
y
suppose two unit vectors are
denoted by v
cos(
This angle can measure from
the projection map. If we assume t
cos(
If denote Because the curve of equal area projection for small (or great) circle is not a circle (arc), it is a forth-degree equation in x, y. the graph of the equation is an elliptic curve. Because it is difficult to find the lengths of semimajor axis and semiminor axis of an ellipse projection curve, so we can not draw the projection graph by plotting elliptic curve directly. In this paper, the author will introduce two methods to plot the small circle and great circle projection.
1.
3.2 Application of equal angle projection Let the plan P(pole p) strike N250E and dip35( Dip direction/dip=160/35),It is required to project this plane by equal angle method. Since the dip direction unit position vector is r=<-0.7698,0.2802,0.5736> , unit normal is n=
<0.5390,-0.1962,0.8192>, then
the great circle projection (x
x
y the great circle center (h,k) and r are
h=
k=
r=
the normal projection (x
x
y Since we can easy to calculate an equal angle projection of center, radius of the great circle and small circle, so to plot the projection diagram is an easy task of plotting an arc for great circle, and circle or arc of small circle projection. The procedures of plotting a small circle projection can be summarized as follows. Calculating a unit normal vector of a plane.
(2a) Calculating then
projection coordinate of the three key points at ( (2b) Or, Calculating the small circle projection its center (h,k), and r . Drawing three points circle, or a circle with center and radius given. The following Excel spreadsheet is designed for calculating and drawing the small (or great) circle equal angle and equal area projection.
|
上次修改此網站的日期: 2013年07月09日



 28
28