|
|
|
|
2019年03月23日 |
|
|
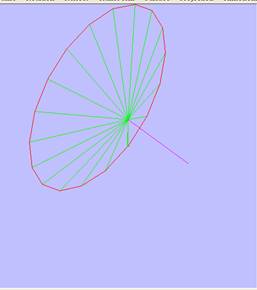
VB program of rotation and reflection in 3D space Rotation in 3D space To rotate a point around a arbitrarily line is quite simple and easy just using the sub m3RotAboutLineGetPtxyzA()(after Glenn Murray, Colorado School of Mines) or function m3RotAboutLineGetPtxyz(), and to rotate a profile or a surface , you can apply the transformation operation to all the points of curve or surface.
Figure 1
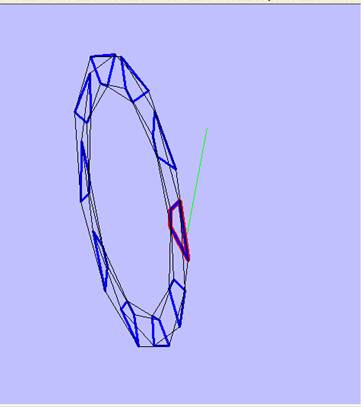
Figure 2
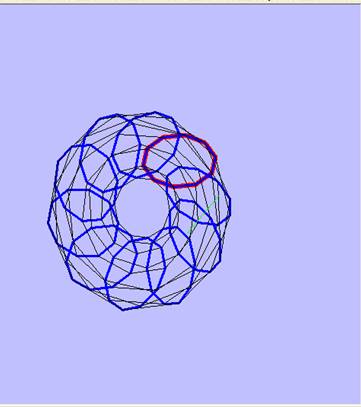
Figure 3
Figure 4 In Figure 3 and figure 4, the red solid lines are profile of base profile curve, the green lines are line of rotation axis.
The following snippet codes of Function m3RotAboutLineGetPtxyz Public Function m3RotAboutLineGetPtxyz(ByRef ptRotBeg As ptXyz, ByRef ptRotEnd As ptXyz, ByRef PtIn As ptXyz, ByVal CitaDeg As Single) ptXyz ‘Glenn Murray,Coloado School of Mines Dim a As Single, b As Single, c As Single, U As Single, V As Single, W As Single, CitaR As Single, L As Single Dim Xin As Single, Yin As Single, Zin As Single Dim ptOut as ptXyz a = ptRotBeg.x b = ptRotBeg.y c = ptRotBeg.z U = ptRotEnd.x - ptRotBeg.x V = ptRotEnd.y - ptRotBeg.y W = ptRotEnd.z - ptRotBeg.z Xin = PtIn.x Yin = PtIn.y Zin = PtIn.z CitaR = CitaDeg * PI / 180# L = Sqr(U ^ 2 + V ^ 2 + W ^ 2) ptOut.x = (a * (L ^ 2 - U ^ 2) + U * (-b * V - c * W + U * Xin + V * Yin + W * Zin) + ((Xin - a) * (L ^ 2 - U ^ 2) + U * (b * V + c * W - V * Yin - W * Zin)) * Cos(CitaR)+ L * (-c * V + b * W - W * Yin + V * Zin) * Sin(CitaR)) / L ^ 2 ptOut.y = (b * (L ^ 2 - V ^ 2) + V * (-a * U - c * W + U * Xin + V * Yin + W * Zin) + ((Yin - b) * (L ^ 2 - V ^ 2) + V * (a * U + c * W - U * Xin - W * Zin)) * Cos(CitaR) + L * (c * U - a * W + W * Xin - U * Zin) * Sin(CitaR)) / L ^ 2 ptOut.z = (c * (L ^ 2 - W ^ 2) + W * (-a * U - b * V + U * Xin + V * Yin + W * Zin) + ((Zin - c) * (L ^ 2 - W ^ 2) + W * (a * U + b * V - U * Xin - V * Yin)) * Cos(CitaR) + L * (-b * U + a * V - V * Xin + U * Yin) * Sin(CitaR)) / L ^ 2 Function m3RotAboutLineGetPtxyz=ptOut End Function
Reflection in 3D space Reflection a point across a line in 2D plane (Figure 5) can apply the translations and rotations operation to get the answer point, or find the closest point(F) to the line (AB) and then extend twice distance of the line[PF, connecting the origin point(P) and closest point(F)] to get point P’, then point P’ is the reflection of point P across line AB.
Figure 5
The following VB 6.0 snippet codes are the sub to find the reflection point across a line in 2d space.
Type CadPoint ‘same as PointF in VB.NET X as single, Y assingle End Type Type CadLine Pts(0) as CadPoint Pts(1) as Cadpoint End Type
Public Function ReflectPointA(ByRef myPoint As CadPoint, ByRef mybaseline As cadLine) As CadPoint ReflectPointA = myPoint Dim ptvert As CadPoint Dim extLine As cadLine extLine = lineEndExtendBothEnd(mybaseline, 1000) ptvert = ClosestPtOnLineToReferPt(myPoint, extLine, True) ' Dim Ldist As Single Ldist = ptptLen(myPoint, ptvert) MsgBox ("ldist=" & Ldist) ReflectPointA = ptOnLine_GivenDist(myPoint, ptvert, 2 * Ldist) End Function Function lineEndExtendBothEnd(ByRef myLine As cadLine, ByVal dist As Single) As cadLine
lineEndExtendBothEnd = myLine lineEndExtendBothEnd.pts(0) = ptOnLine_GivenDist(myLine.pts(1), myLine.pts(0), dist) lineEndExtendBothEnd.pts(1) = ptOnLine_GivenDist(myLine.pts(0), myLine.pts(1), dist) End Function
Function ptOnLine_GivenDist(ByRef ptFrom As CadPoint, ByRef ptToEnd As CadPoint, ByVal myDistFromStart As Single) As CadPoint Dim Lline As Single Lline = ptptLen(ptFrom, ptToEnd) ptOnLine_GivenDist.X = ptFrom.X + (ptToEnd.X - ptFrom.X) * myDistFromStart / Lline ptOnLine_GivenDist.Y = ptFrom.Y + (ptToEnd.Y - ptFrom.Y) * myDistFromStart / Lline End Function
Private Function ClosestPtOnLineToReferPt(ByRef referPt As CadPoint, ByRef myLine As cadLine, Optional ByRef isRealPtIn As Boolean = True) As CadPoint ’find a closest point to a line from a given point(已知線外一點求垂線座標垂足點) Dim aX As Single, aY As Single, Bx, By As Single, px As Single, py As Single, Ldist As Single Dim vAB_x As Single, vAB_y As Single, uAB_x As Single, uAB_y As Single, vPA_x As Single, vPA_y As Single, ptvert As CadPoint Dim t As Single, isPtonLine As Boolean, Ltl As Single, L1 As Single, L2 As Single ', ptVert As CadLine
Bx = myLine.Vertex(1).X By = myLine.Vertex(1).Y aX = myLine.Vertex(0).X aY = myLine.Vertex(0).Y px = referPt.X py = referPt.Y vAB_x = Bx - aX vAB_y = By - aY Ldist = Sqr(vAB_x ^ 2 + vAB_y ^ 2) If Ldist <= 0.0001 Then Exit Function uAB_x = vAB_x / Ldist ' x comp. of unit vector(uab)單位向量 uab的x分量 uAB_y = vAB_y / Ldist 'y comp. of unit vector(uab) 單位向量 uab的y分量 vPA_x = px - aX vPA_y = py - aY t = uAB_x * vPA_x + uAB_y * vPA_y ptvert.X = aX + t * uAB_x ptvert.Y = aY + t * uAB_y If isRealPtIn = False Then ClosestPtOnLineToReferPt = ptvert Exit Function End If 'Check point on line
If isRealPtIn = True Then If IsPtOnLine_ByPoint(myLine, ptvert) Then ClosestPtOnLineToReferPt = ptvert Else ClosestPtOnLineToReferPt.X = 99999999# ClosestPtOnLineToReferPt.Y = 99999999#
End If End If
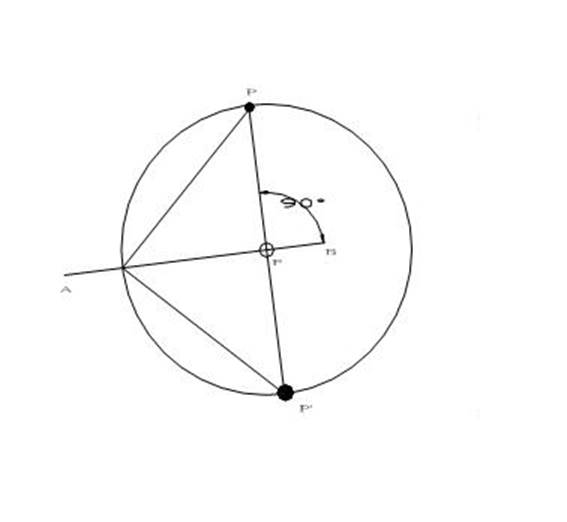
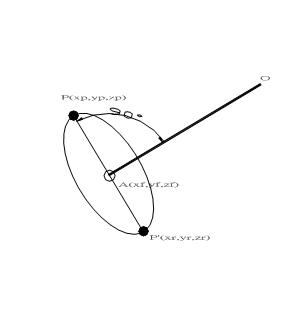
In 3D space(Figure 6), the reflection of a point(P) across a arbitrarily line(AB) are more complicated by using transformation matrix operation, but we can simple rotate the point[P(x,y,z)] around line(OA) through 180° to get the desired point[P’(xf,yf,zf)].
Figure 6
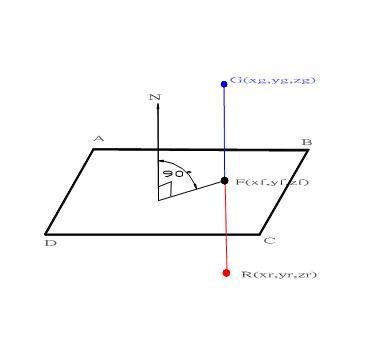
In figure 7, drawing a line from point [G(xg,yg,zg)] parallel to the normal N(a,b,c) of plane ABCD, this line penetrate the plane at point [P(x,y,z)], then line GB can be defined as:
x=xg+t*a :y=yg_t*b:z=zg+t*c
substituting x,y,z into palne ax+by+cz=d ,we can get
t=(d-a*xg-b*yg-c*zg)/(a^2+b^2+c^2) and x=xg+a*(d-a*xg-b*yg-c*zg)/(a^2+b^2+c^2) y=yg+b*(d-a*xg-b*yg-c*zg)/(a^2+b^2+c^2) z=zg+c*(d-a*xg-b*yg-c*zg)/(a^2+b^2+c^2)
Figure 7
The following snippet codes are the sub programs to implement of reflection of a point across a line, a point across a plane.
Type ptXyz X as single Y as single Z as single End Type (a) Reflect a point across a line Public Function ptXyzReflection_Rot(myLineXyz As LineXyz, PtIn As ptXyz, Optional chk As Single = 0#) As ptXyz
Dim ptRotBeg As ptXyz Dim ptRotEnd As ptXyz Dim ptReflect As ptXyz ptRotBeg = myLineXyz.pts(0) ptRotEnd = myLineXyz.pts(1) Call m3RotAboutLineGetPtxyzA(ptRotBeg, ptRotEnd, PtIn, 180, ptReflect) ptXyzReflection_Rot = ptReflect
Dim delx1 As Single, dely1 As Single, delZ1 As Single Dim delx2 As Single, dely2 As Single, delZ2 As Single delx1 = myLineXyz.pts(1).x - myLineXyz.pts(0).x dely1 = myLineXyz.pts(1).y - myLineXyz.pts(0).y delZ1 = myLineXyz.pts(1).z - myLineXyz.pts(0).z delx2 = ptXyzReflection_Rot.x - PtIn.x dely2 = ptXyzReflection_Rot.y - PtIn.y delZ2 = ptXyzReflection_Rot.z - PtIn.z chk = Abs(delx1 * delx2 + dely1 * dely2 + delZ1 * delZ2) If chk >= 0.01 Then MsgBox ("Err= " & chk) End Function (b) Rotate a point around a line
Public Sub m3RotAboutLineGetPtxyzA(ByRef ptRotBeg As ptXyz, ByRef ptRotEnd As ptXyz, ByRef PtIn As ptXyz, ByVal CitaDeg As Single, ByRef ptOut As ptXyz) ‘after Glenn Murray,Coloado School of Mines Dim a As Single, b As Single, c As Single, U As Single, V As Single, W As Single, CitaR As Single, L As Single Dim Xin As Single, Yin As Single, Zin As Single a = ptRotBeg.x b = ptRotBeg.y c = ptRotBeg.z U = ptRotEnd.x - ptRotBeg.x V = ptRotEnd.y - ptRotBeg.y W = ptRotEnd.z - ptRotBeg.z Xin = PtIn.x Yin = PtIn.y Zin = PtIn.z CitaR = CitaDeg * PI / 180# L = Sqr(U ^ 2 + V ^ 2 + W ^ 2) ptOut.x = (a * (L ^ 2 - U ^ 2) + U * (-b * V - c * W + U * Xin + V * Yin + W * Zin) + ((Xin - a) * (L ^ 2 - U ^ 2) + U * (b * V + c * W - V * Yin - W * Zin)) * Cos(CitaR) _ + L * (-c * V + b * W - W * Yin + V * Zin) * Sin(CitaR)) / L ^ 2 ptOut.y = (b * (L ^ 2 - V ^ 2) + V * (-a * U - c * W + U * Xin + V * Yin + W * Zin) + ((Yin - b) * (L ^ 2 - V ^ 2) + V * (a * U + c * W - U * Xin - W * Zin)) * Cos(CitaR) _ + L * (c * U - a * W + W * Xin - U * Zin) * Sin(CitaR)) / L ^ 2 ptOut.z = (c * (L ^ 2 - W ^ 2) + W * (-a * U - b * V + U * Xin + V * Yin + W * Zin) + ((Zin - c) * (L ^ 2 - W ^ 2) + W * (a * U + b * V - U * Xin - V * Yin)) * Cos(CitaR) _ + L * (-b * U + a * V - V * Xin + U * Yin) * Sin(CitaR)) / L ^ 2
End Sub
While the reflection of a point G(xg,yg,zg) about a plane ABCD, we can draw a line parallel to the plane normal and get the penetrating point(F) and extend to the point to let GF=FR.
(c) Reflect a point across a plane Public Function PtxyzReflection_plane(a As Single, b As Single, c As Single, d As Single, ptOutside As ptXyz) As ptXyz 'ax+by+cz=d Dim ptFoot As ptXyz Dim L As Single ptFoot = ClosestPtToPlane(a, b, c, d, ptOutside) L = ptptLenXyz(ptOutside, ptFoot) PtxyzReflection_plane = ptxyzOnLineXyz_GivenDist(ptOutside, ptFoot, 2 * L) End Function
Public Function ClosestPtToPlane(a As Single, b As Single, c As Single, d As Single, ptOutside As ptXyz) As ptXyz 'ax+by+cz=d Dim t As Single t = (d - ptOutside.x * a - ptOutside.y * b - ptOutside.z * c) / (a ^ 2 + b ^ 2 + c ^ 2) ClosestPtToPlane.x = ptOutside.x + t * a ClosestPtToPlane.y = ptOutside.y + t * b ClosestPtToPlane.z = ptOutside.z + t * c End Function
Public Function ptxyzOnLineXyz_GivenDist(ptxyzBeg As ptXyz, ptxyzEnd As ptXyz, distFromBeg As Single) As ptXyz Dim Lt As Double Lt = ptptLenXyz(ptxyzBeg, ptxyzEnd) If Lt <= 0.01 Then MsgBox ("err in ptxyzOnLineXyz_GivenDist ;pt1= " & ptXyzToString(ptxyzBeg) & "; pt2= " & ptXyzToString(ptxyzEnd))
End If ptxyzOnLineXyz_GivenDist.x = ptxyzBeg.x + (ptxyzEnd.x - ptxyzBeg.x) * distFromBeg / Lt ptxyzOnLineXyz_GivenDist.y = ptxyzBeg.y + (ptxyzEnd.y - ptxyzBeg.y) * distFromBeg / Lt ptxyzOnLineXyz_GivenDist.z = ptxyzBeg.z + (ptxyzEnd.z - ptxyzBeg.z) * distFromBeg / Lt End Function
Figure 8
Figure 9
Figure 10 In figure 10, the blue surface is the drawing of function z=x^2+y^2-16, the red surface is the reflection curve of z=x^2+y^2-16, while the black is the combination of reflection and translation of the original surface.
For more information, please link www.chday169.url.tw
|
上次修改此網站的日期: 2018年11月25日